报告详情
Non-intrusive load perception and flexibility evaluation for electric vehicle charging station: a deep learning based approach
编号:422
访问权限:仅限参会人
更新:2022-05-21 15:57:08
浏览:271次
张贴报告
摘要
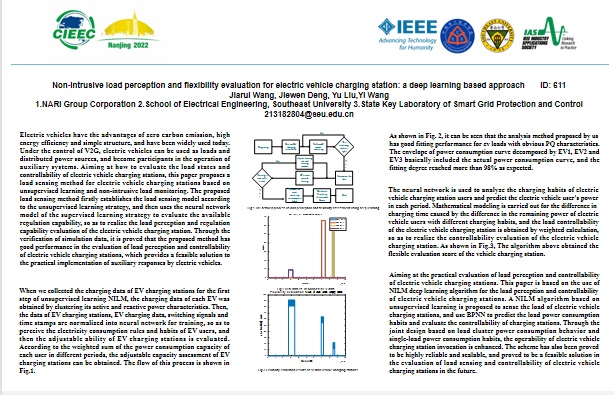
Electric vehicles have the advantages of zero carbon emission, high energy efficiency and simple structure, and have been widely used today. Under the control of V2G, electric vehicles can be used as loads and distributed power sources, and become participants in the operation of auxiliary systems. Aiming at how to evaluate the load states and controllability of electric vehicle charging stations, this paper proposes a load sensing method for electric vehicle charging stations based on unsupervised learning and non-intrusive load monitoring. The proposed load sensing method firstly establishes the load sensing model according to the unsupervised learning strategy, and then uses the neural network model of the supervised learning strategy to evaluate the available regulation capability, so as to realize the load perception and regulation capability evaluation of the electric vehicle charging station. Through the verification of simulation data, it is proved that the proposed method has good performance in the evaluation of load perception and controllability of electric vehicle charging stations, which provides a feasible solution to the practical implementation of auxiliary responses by electric vehicles.
关键词
NILM, Deep learning, auxiliary service, electric vehicles, flexibility evaluation
报告人

JiaruiWang
student 东南大学全部评论
重要日期
-
会议日期
05月27日
2022
至05月29日
2022
-
02月28日 2022
初稿截稿日期
-
05月29日 2022
注册截止日期
-
06月22日 2022
报告提交截止日期
主办单位
IEEE Beijing Section
China Electrotechnical Society
Southeast University
China Electrotechnical Society
Southeast University
协办单位
IEEE Industry Applications Society
IEEE Nanjing Section
IEEE Nanjing Section
联系方式
- Organizing Committee
- ch******@ces.org.cn
- +86********
历届会议
-
2026年05月15日 中国 Tianjin
2026 IEEE 9th International Electrical and Energy Conference (CIEEC) -
2025年05月16日 中国 Changsha
2025 IEEE 8th International Electrical and Energy Conference -
2024年05月10日 中国 Harbin
2024 IEEE 7th International Electrical and Energy Conference (CIEEC) -
2023年05月12日 中国 Hefei
2023 IEEE 6th International Electrical and Energy Conference -
2022年05月27日 中国
2022 年电气电子工程师学会电力与能源分会(IEEE PES)年会 -
2021年05月28日 中国 Wuhan
2021中国电力和能源国际会议 -
2018年11月04日 中国
2018中国电力和能源国际会议 -
2017年10月25日 中国 东城区
2017中国电力和能源国际会议


发表评论