报告详情
Research on Discriminant Model of Driver's Perception of Risk Based on Hazardous Scenarios
编号:137
访问权限:公开
更新:2022-07-06 21:25:40
浏览:321次
张贴报告
摘要
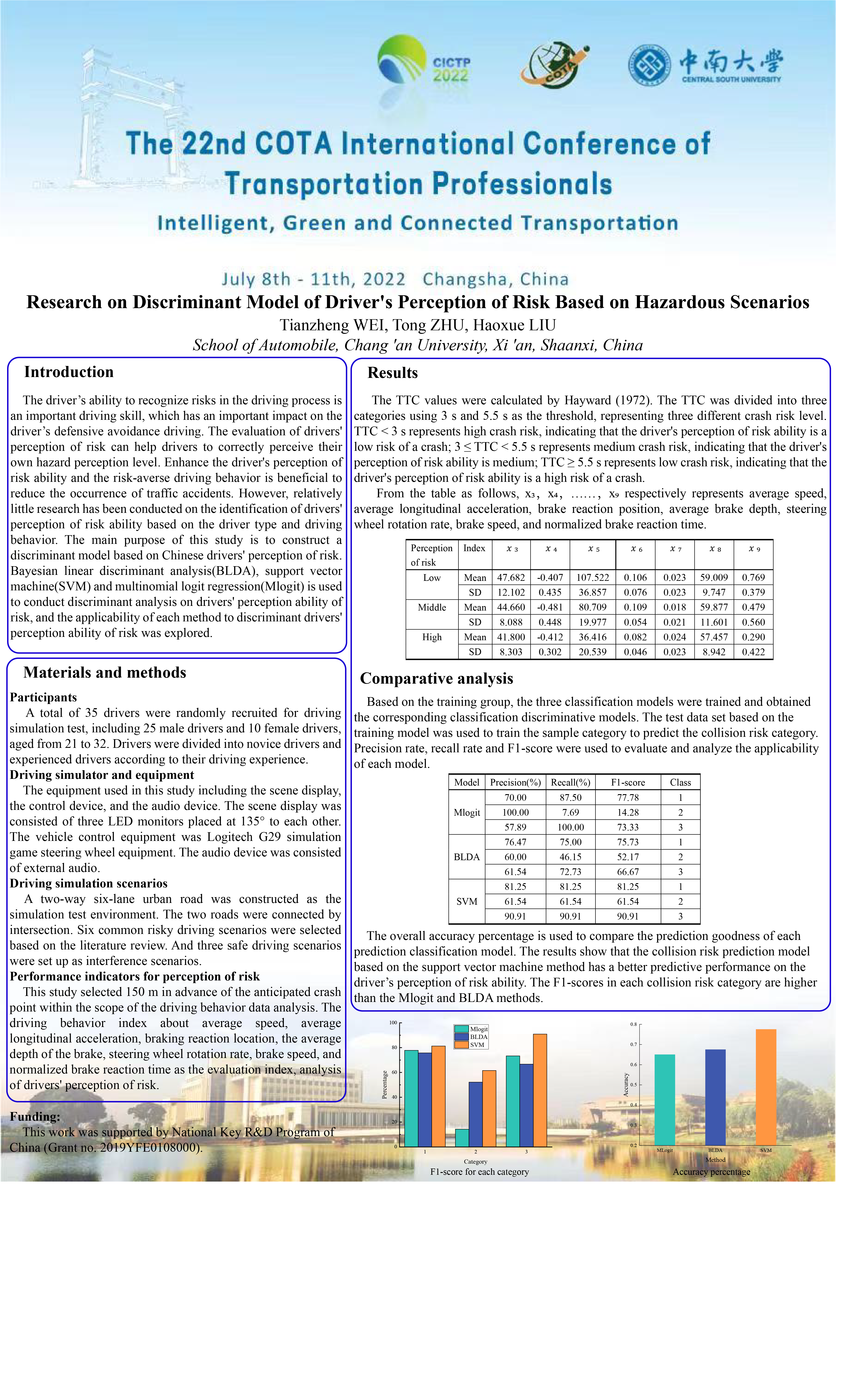
In the complex traffic environment, drivers' perception of risk could better predict the potential danger, which helps drivers to take timely measures to avoid the occurrence of collision accidents. Therefore, it is helpful to take targeted measures to improve drivers' safety driving ability by accurately identifying drivers' perception of risk ability. To explore the predictors of drivers' perception of risk ability, typical hazardous scenarios were selected and a risk driving behavior test platform was built based on driving simulator. A total of 35 drivers was recruited for driving simulation tests to collect data on drivers' driving behavior in hazardous scenarios. Based on the TTC, drivers' perception of risk could fall into three categories. Based on the Bayesian linear discriminant method, the support vector machine (SVM), and multinomial logit model, the prediction model of driver's perception of risk ability was constructed. The models constructed by different methods to drivers' perception of risk ability were compared based on the precision rate and F1-score. The results show that the support vector machine has the best predictive performance for the perception of risk. Bayesian linear discriminant method is the second, multinomial logit regression is the worst. In future mixed traffic conditions, it is of great significance to predict drivers' perception of risk ability for improving traffic safety.
关键词
traffic safety;driving simulation;hazard perception;driving behavior;discriminant analysis
报告人
Tianzheng Wei
Ph.D student chang‘an university全部评论
重要日期
-
会议日期
07月08日
2022
至07月11日
2022
-
07月11日 2022
报告提交截止日期
-
07月11日 2022
注册截止日期
主办单位
Chinese Overseas Transportation Association
Central South University (CSU)
Central South University (CSU)
联系方式
- Conference Organizing Committee
- ci******@gmail.com
历届会议
-
2025年07月22日 中国 广州市(Guangzhou)
第25届COTA国际交通科技年会 -
2024年07月23日 中国 Shenzhen
第24届海外华人交通协会国际交通科技年会(CICTP 2024) -
2023年07月15日 中国 北京(Beijing)
海外华人交通协会国际交通科技年会 -
2021年12月17日 中国 Xi'an
The 20th and 21st joint COTA International Conference of Transportation Professionals -
2019年07月06日 中国 南京
The 19th COTA International Conference of Transportation Professionals -
2018年07月05日 中国 Haidian District
18th COTA International Conference of Transportation Professionals -
2016年07月06日 中国 Shanghai, China
The 16th COTA conference International Conference of Transportation Professionals -
2013年08月14日 中国 深圳市
International Conference of Transportation Professionals


发表评论