报告详情
A Cooperative Lane-changing Approach Considering the Motion Similarity Between Vehicles
编号:25
访问权限:仅限参会人
更新:2022-07-06 14:57:13
浏览:331次
张贴报告
摘要
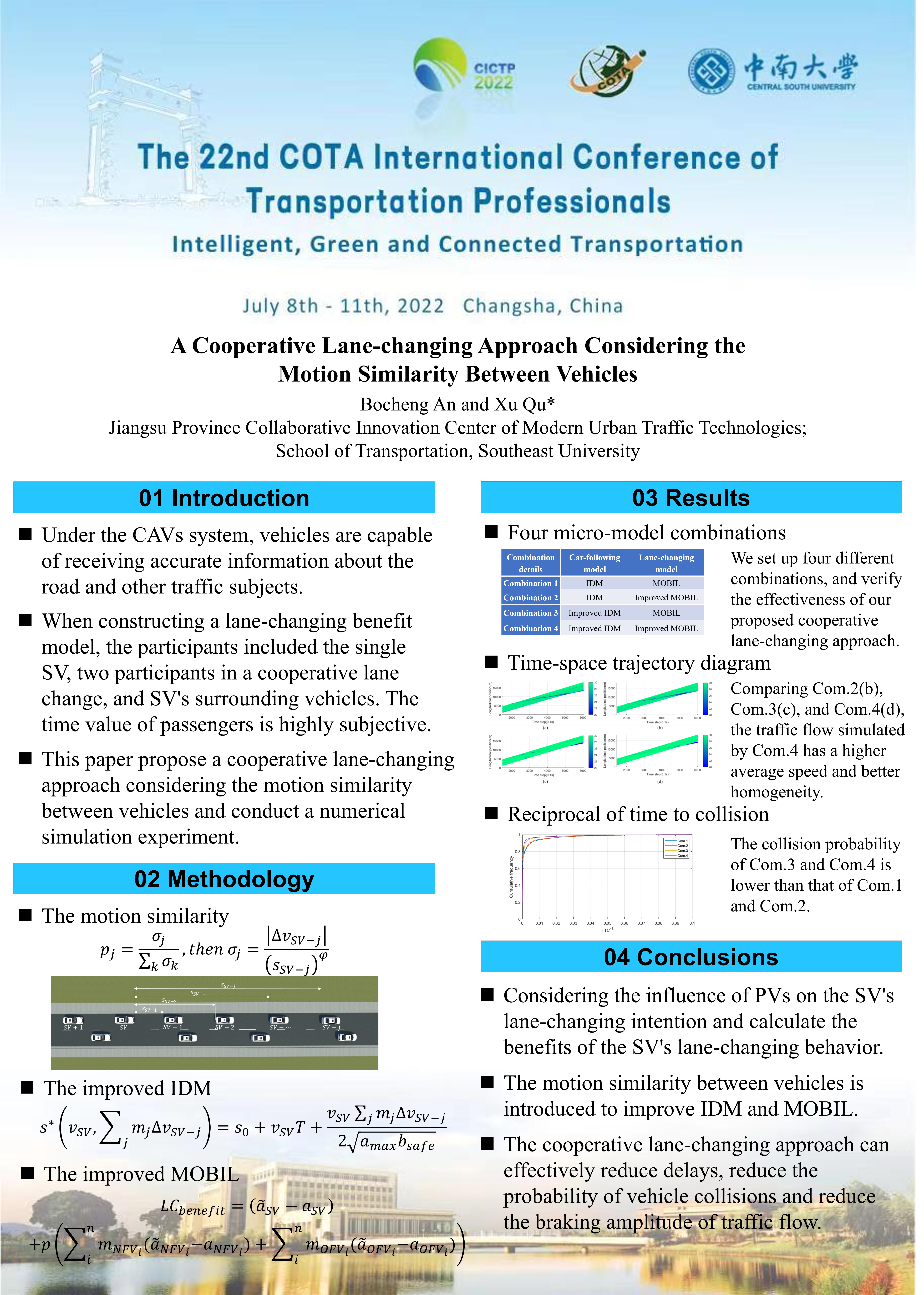
This paper proposes a cooperative lane-changing approach that considers the motion similarity between vehicles and conducts the numerical simulation experiment to verify its effectiveness. First, we take advantage of the real-time information interaction under connected and automated vehicle environment to design the lane-changing process. Second, the motion similarity between vehicles is used to improve the Intelligent Driver Model and the Minimizing Overall Braking Induced by Lane Changes model. Additionally, we consider the preceding vehicles' influence on the subject vehicle lane-changing intention and analyze the benefits of the subject vehicle lane-changing behavior on the traffic flows. Finally, we conduct a numerical simulation experiment based on MATLAB. The cooperative lane-changing approach is evaluated from the homogeneity of traffic flow, efficiency, safety, and comfort. The simulation results show that the cooperative lane-changing approach we proposed can effectively reduce delays, reduce the probability of vehicle collisions and reduce the braking amplitude of traffic flow.
关键词
Connected and Automated Vehicles;Motion Similarity;Lane-changing
报告人
Bocheng An
School of Transportation, Southeast University全部评论
重要日期
-
会议日期
07月08日
2022
至07月11日
2022
-
07月11日 2022
报告提交截止日期
-
07月11日 2022
注册截止日期
主办单位
Chinese Overseas Transportation Association
Central South University (CSU)
Central South University (CSU)
联系方式
- Conference Organizing Committee
- ci******@gmail.com
历届会议
-
2025年07月22日 中国 广州市(Guangzhou)
第25届COTA国际交通科技年会 -
2024年07月23日 中国 Shenzhen
第24届海外华人交通协会国际交通科技年会(CICTP 2024) -
2023年07月15日 中国 北京(Beijing)
海外华人交通协会国际交通科技年会 -
2021年12月17日 中国 Xi'an
The 20th and 21st joint COTA International Conference of Transportation Professionals -
2019年07月06日 中国 南京
The 19th COTA International Conference of Transportation Professionals -
2018年07月05日 中国 Haidian District
18th COTA International Conference of Transportation Professionals -
2016年07月06日 中国 Shanghai, China
The 16th COTA conference International Conference of Transportation Professionals -
2013年08月14日 中国 深圳市
International Conference of Transportation Professionals


发表评论