报告详情
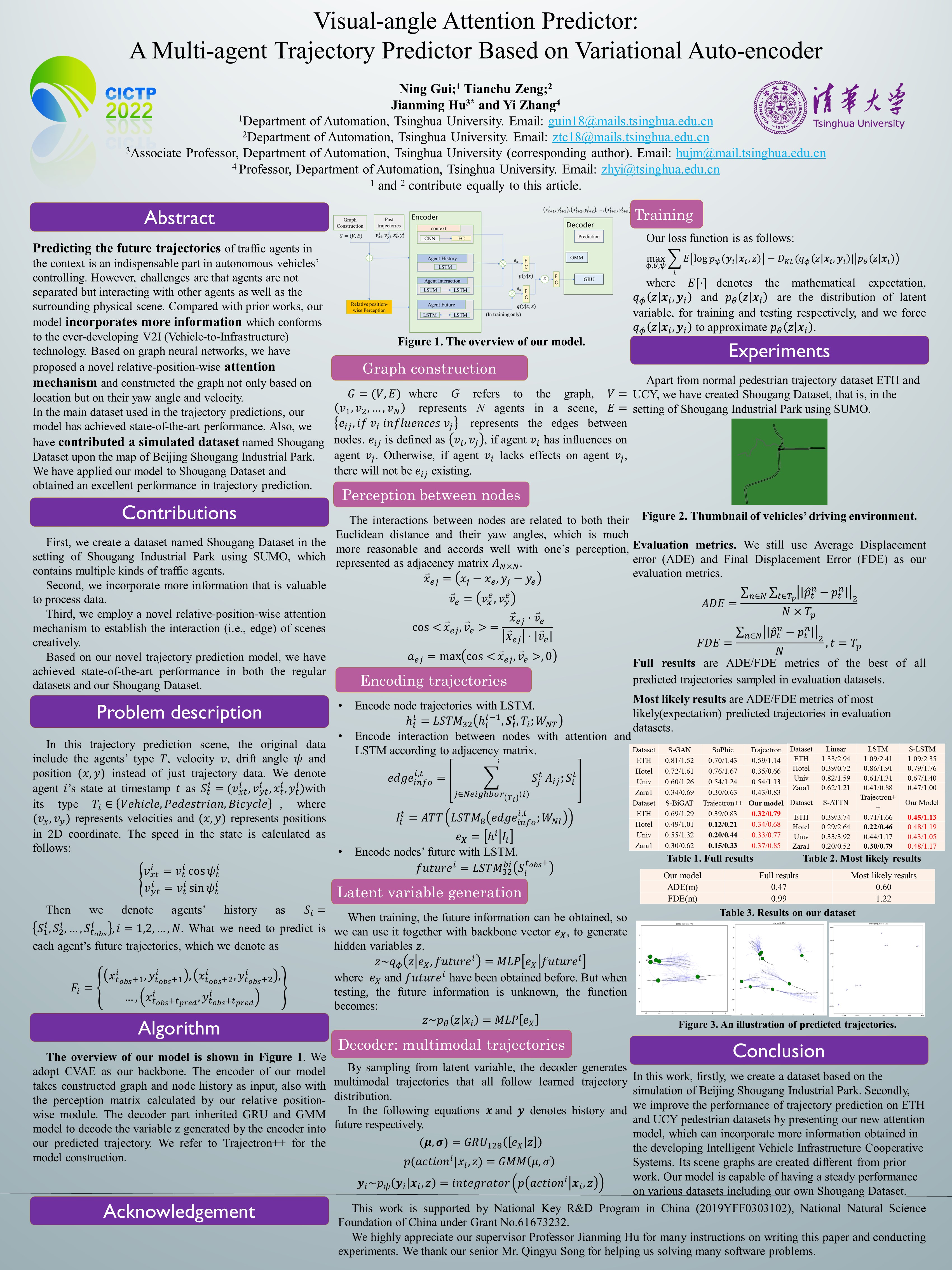
Visual-angle Attention Predictor: A Multi-agent Trajectory Predictor Based on Variational Auto-encoder
编号:77
访问权限:公开
更新:2022-07-08 09:16:19
浏览:344次
张贴报告
摘要
Traffic state perception is an indispensable part in autonomous vehicles’ controlling. Meantime predicting the future trajectories of agents in the context is of great significance in perception of traffic states. However, challenges are that agents are not separated but interacting with other agents as well as the surrounding physical scene. Currently, most of the best models are based on graph neural network, but prior works normally include only position and timestep without other available and valuable information. Our model incorporates more information which conforms to the ever-developing V2I (Vehicle-to-Infrastructure) technology. More importantly, we have proposed a novel relative-position-wise attention mechanism and constructed the graph not only based on distance but on their yaw angle and velocity. In the main dataset used in the trajectory predictions, our model has achieved state-of-the-art performance. Also, we have contributed a simulated dataset named Shougang Dataset upon the map of Beijing Shougang Industrial Park. We have applied our model to Shougang Dataset and obtained an excellent performance in trajectory prediction.
关键词
暂无
报告人

Ning Gui
Tsinghua University Tianchu Zeng
Tsinghua University全部评论
重要日期
-
会议日期
07月08日
2022
至07月11日
2022
-
07月11日 2022
报告提交截止日期
-
07月11日 2022
注册截止日期
主办单位
Chinese Overseas Transportation Association
Central South University (CSU)
Central South University (CSU)
联系方式
- Conference Organizing Committee
- ci******@gmail.com
历届会议
-
2025年07月22日 中国 广州市(Guangzhou)
第25届COTA国际交通科技年会 -
2024年07月23日 中国 Shenzhen
第24届海外华人交通协会国际交通科技年会(CICTP 2024) -
2023年07月15日 中国 北京(Beijing)
海外华人交通协会国际交通科技年会 -
2021年12月17日 中国 Xi'an
The 20th and 21st joint COTA International Conference of Transportation Professionals -
2019年07月06日 中国 南京
The 19th COTA International Conference of Transportation Professionals -
2018年07月05日 中国 Haidian District
18th COTA International Conference of Transportation Professionals -
2016年07月06日 中国 Shanghai, China
The 16th COTA conference International Conference of Transportation Professionals -
2013年08月14日 中国 深圳市
International Conference of Transportation Professionals


发表评论